𝙙𝙞𝙨𝗮𝗿𝗺𝗶𝗻𝗴 II
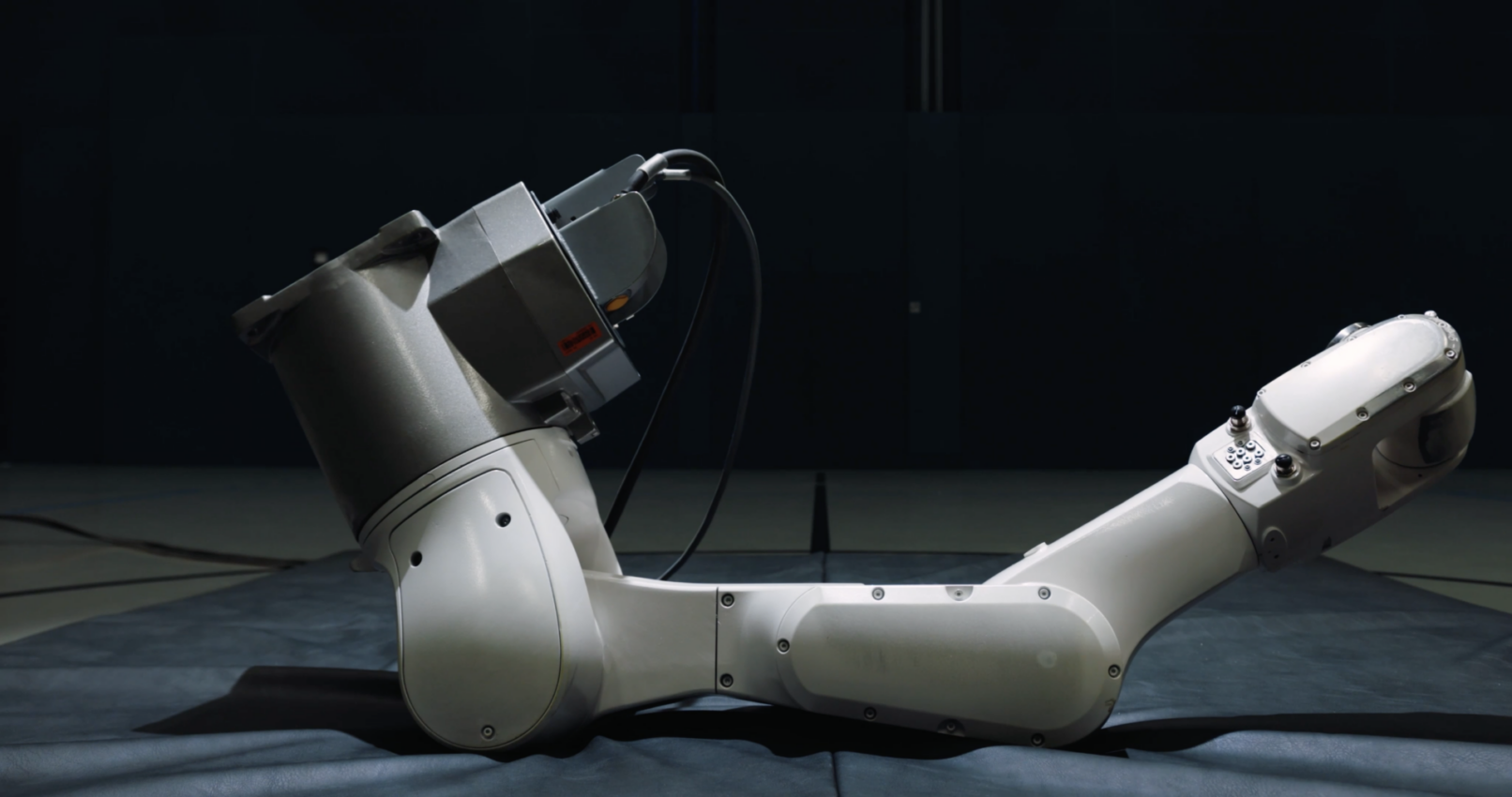
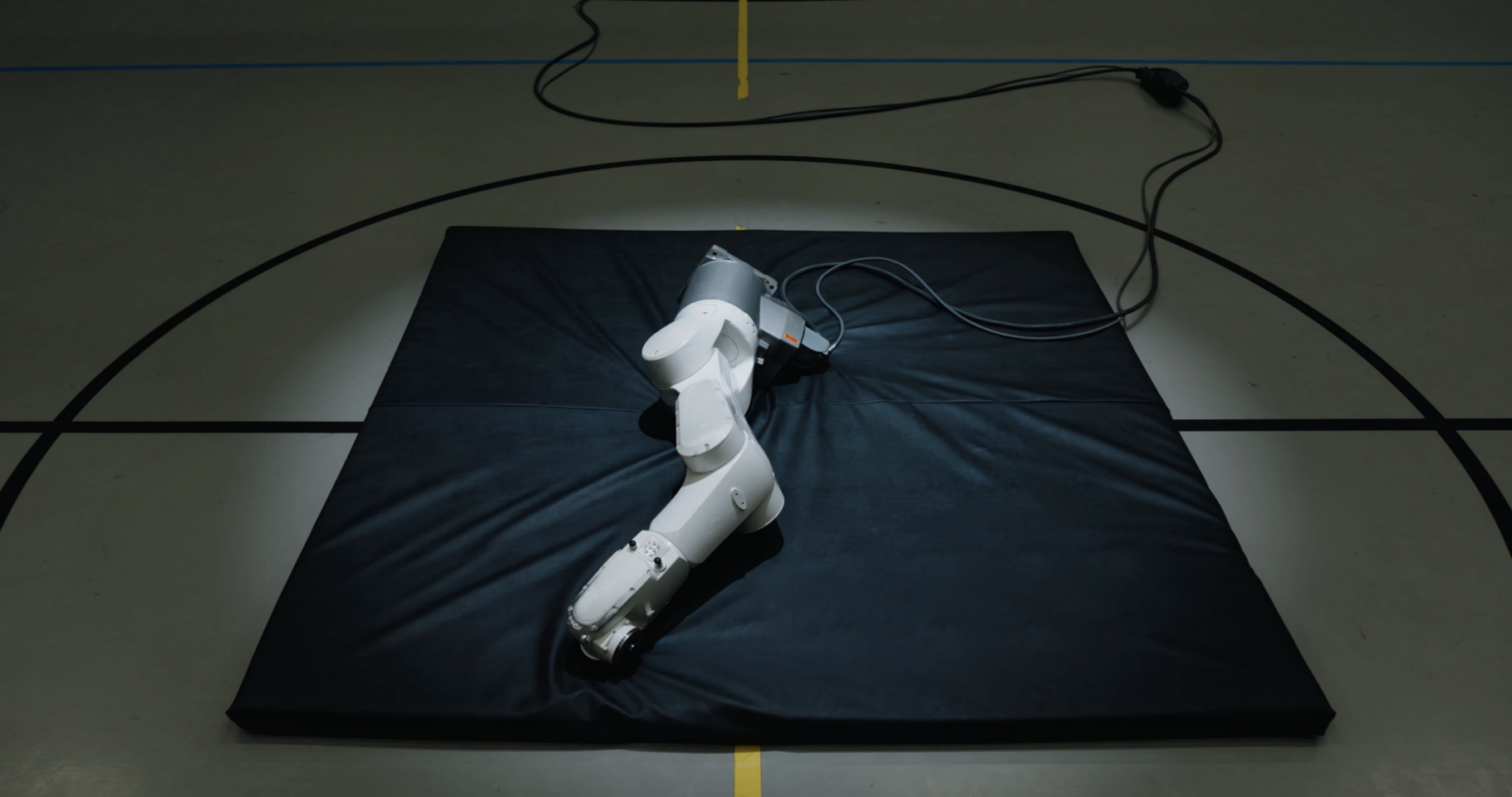
disarming II continues the disarming series by shifting the encounter from the fallow cornfield onto a gym mat. A used KUKA KR6 R900-2 industrial robotic arm, freed from its mounting base, durationally learns locomotion across days and weeks of exhibition. What the work foregrounds is not the capability of machine learning but its performativity, the way in which a learning process, made visible and audible, transforms the perception of everyone present.
A Reinforcement Learning agent continuously trains on observations from the physical robot and its embedded virtual environment. Crucially, the virtual robot’s orientation is decoupled from that of the physical robot, leading to moments of virtual success paired with physical struggle and vice versa. This designed discrepancy suspends easy judgment and opens a space to observe the projections, attributions, and shifting relationships between all involved entities.
The learning is deliberately stretched and inefficient. The loud frictional sounds of metal dragging across textile fill the room. Over time, the robot’s steel surface and the mat’s fabric slowly reshape one another, accumulating physical traces of the encounter from one exhibition to the next. What begins as a performative situation gradually becomes sculptural, the material record of a machine and its environment inscribing themselves into each other.
For further background on the work, see this alt.HRI paper presented at the ACM/IEEE International Conference on Human-Robot Interaction: https://dl.acm.org/doi/10.5555/3721488.3721636
Core team
Emanuel Gollob – research, concept & production
Advice and support
Markus Krampl – video documentation
Amir Bastan – real-time robot control
Magdalena May – scenography
Creative Robotics – robotic hardware support
WRO ART Center team – curatorial and organizational support
Hardware | KUKA industrial robot arm | Mini PC | gym mat
Software | Reinforcement Learning | vvvv gamma | bunraku.xyz | Robot Sensor Interface
Acknowledgements | Supported by BC Gallery | This work was realised within the framework of a European Media Art Platform residency program at WRO Art Center with support from the Creative Europe Culture Programme of the European Union
References excerpt
Barad, Karen. Transmaterialities: Trans/matter/realities and queer political imaginings. GLQ: A Journal of Lesbian and gay Studies 21.2-3 (2015): 387-422.
Hayles, N. Katherine. Unthought: The power of the cognitive nonconscious. University of Chicago Press, (2017).
Hui, Yuk. Art and Cosmotechnics. University of Minnesota Press, (2021).
Penny, Simon. Making Sense: Cognition, Computing, Art, and Embodiment. The MIT Press (2017)
Riskin, Jessica. Genesis Redux: Essays in the History and Philosophy of Artificial Life. University of Chicago Press (2007)
Slager, Henk. The Pleasure of Research. Hatje Cantz Verlag (2015)